
Le Design

Le but est de lui faire prendre de la hauteur. J’ai récupéré le corps du robot de la version précédente pour l’intégrer sur une base plus haute. Dans la version précédente, REGO mesurait 80 cm. Trop petit pour interagir correctement avec une personne. Pour la tête, elle est en cours de développement, elle sera mobile (Gauche-Droite/ Haut-Bas). Je pense garder celle de la version précédente et la rendre mobile.
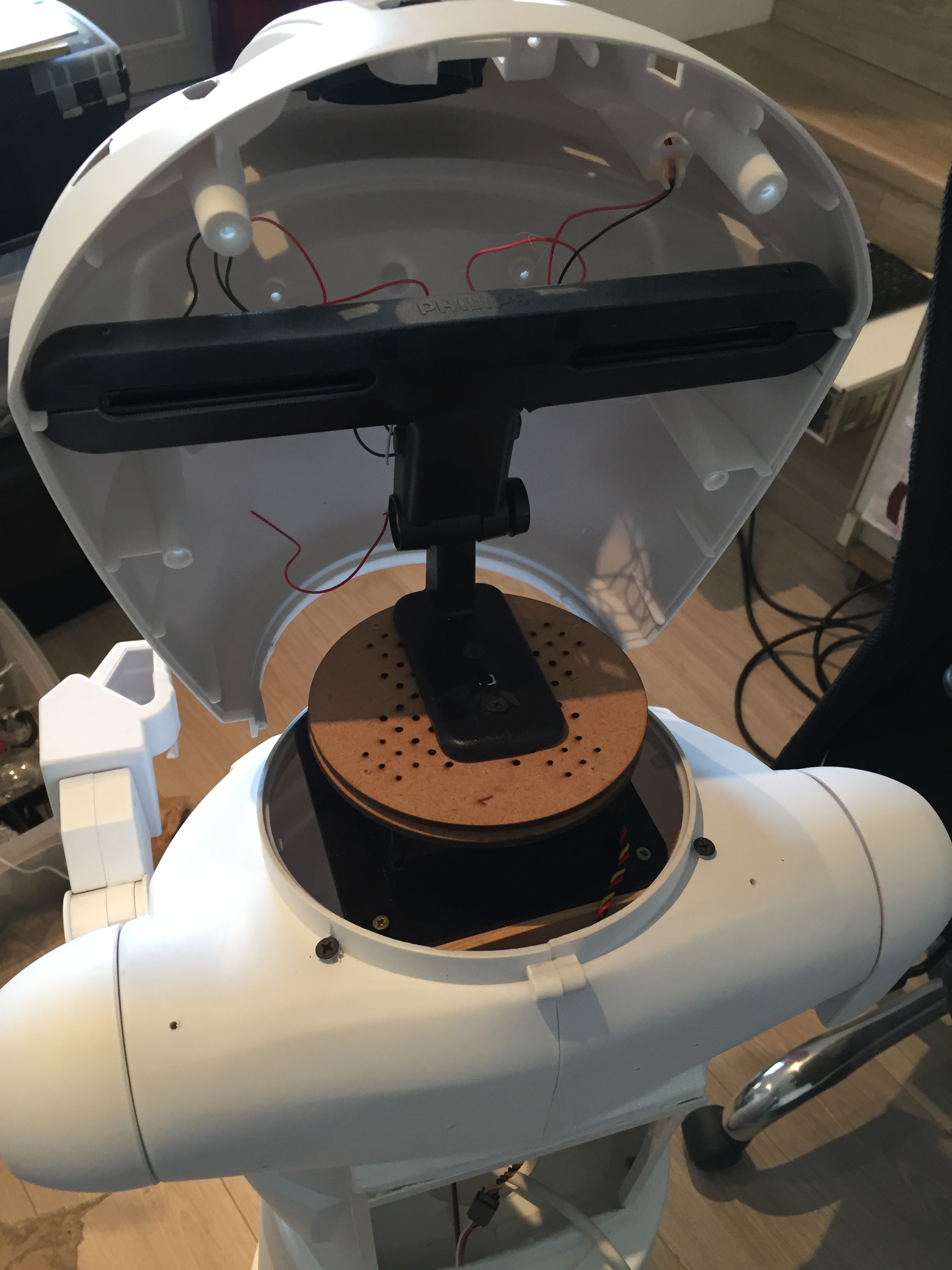
 La base avec les capteurs ultrason intégrés
La base avec les capteurs ultrason intégrés
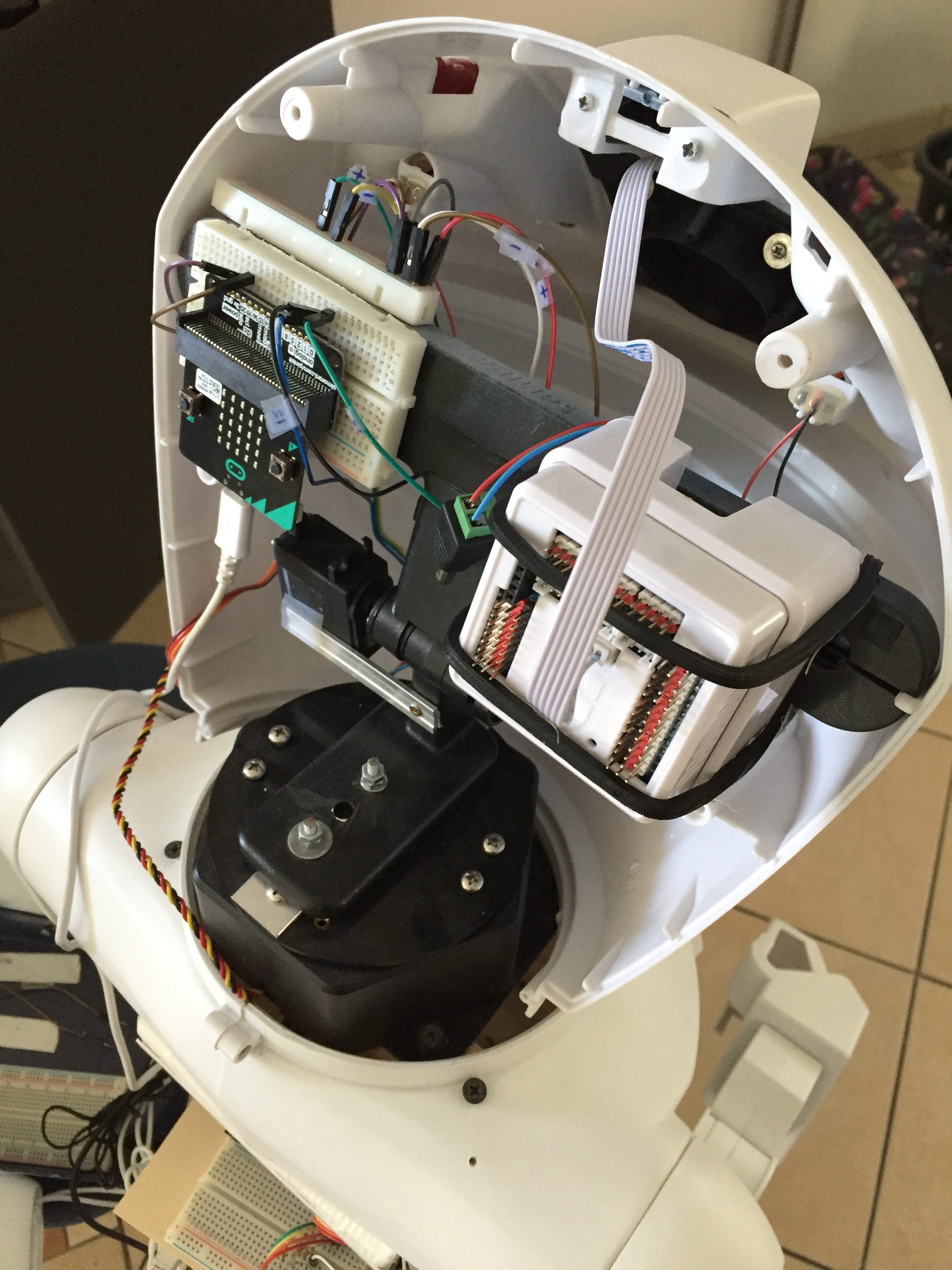
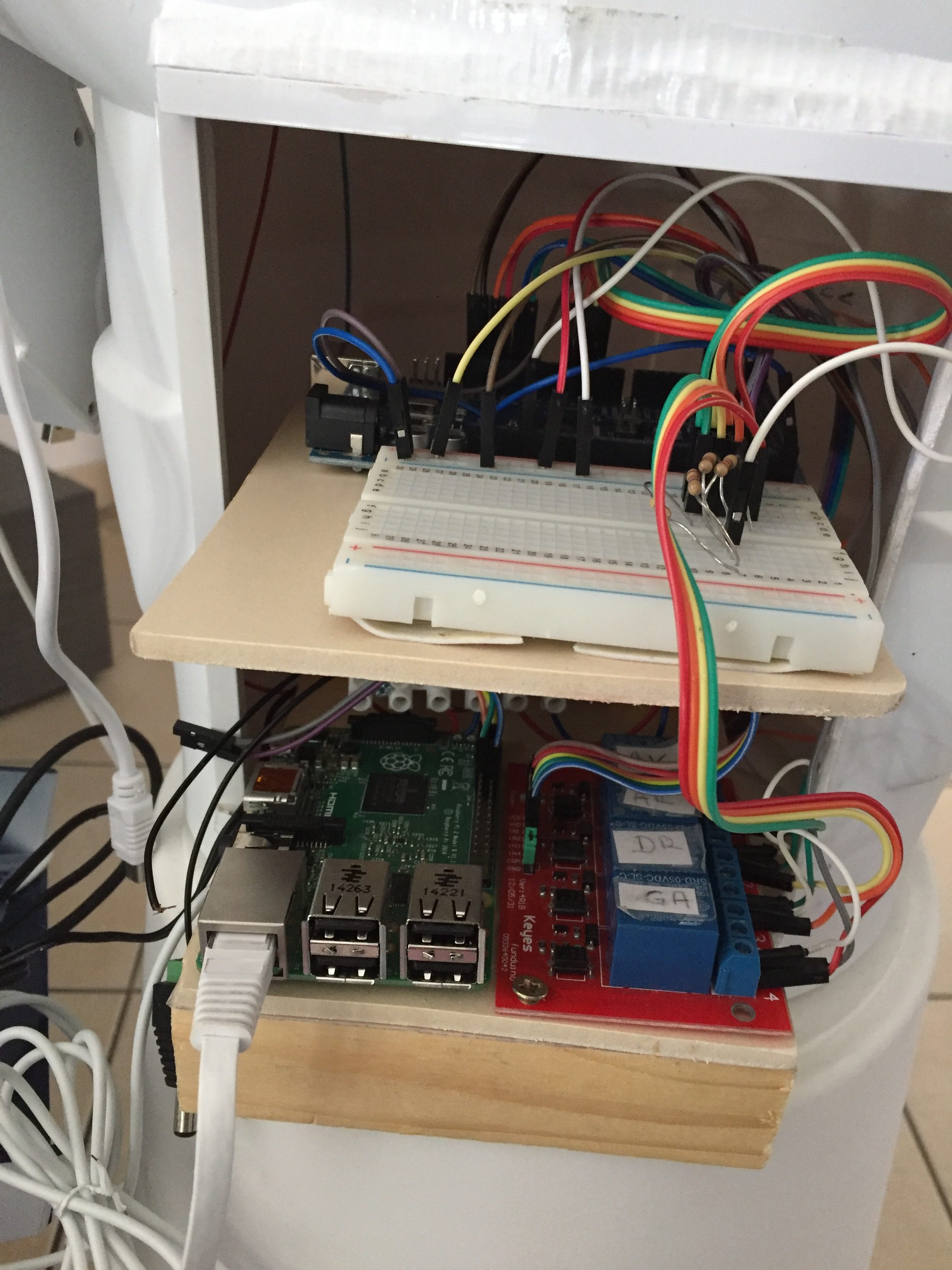
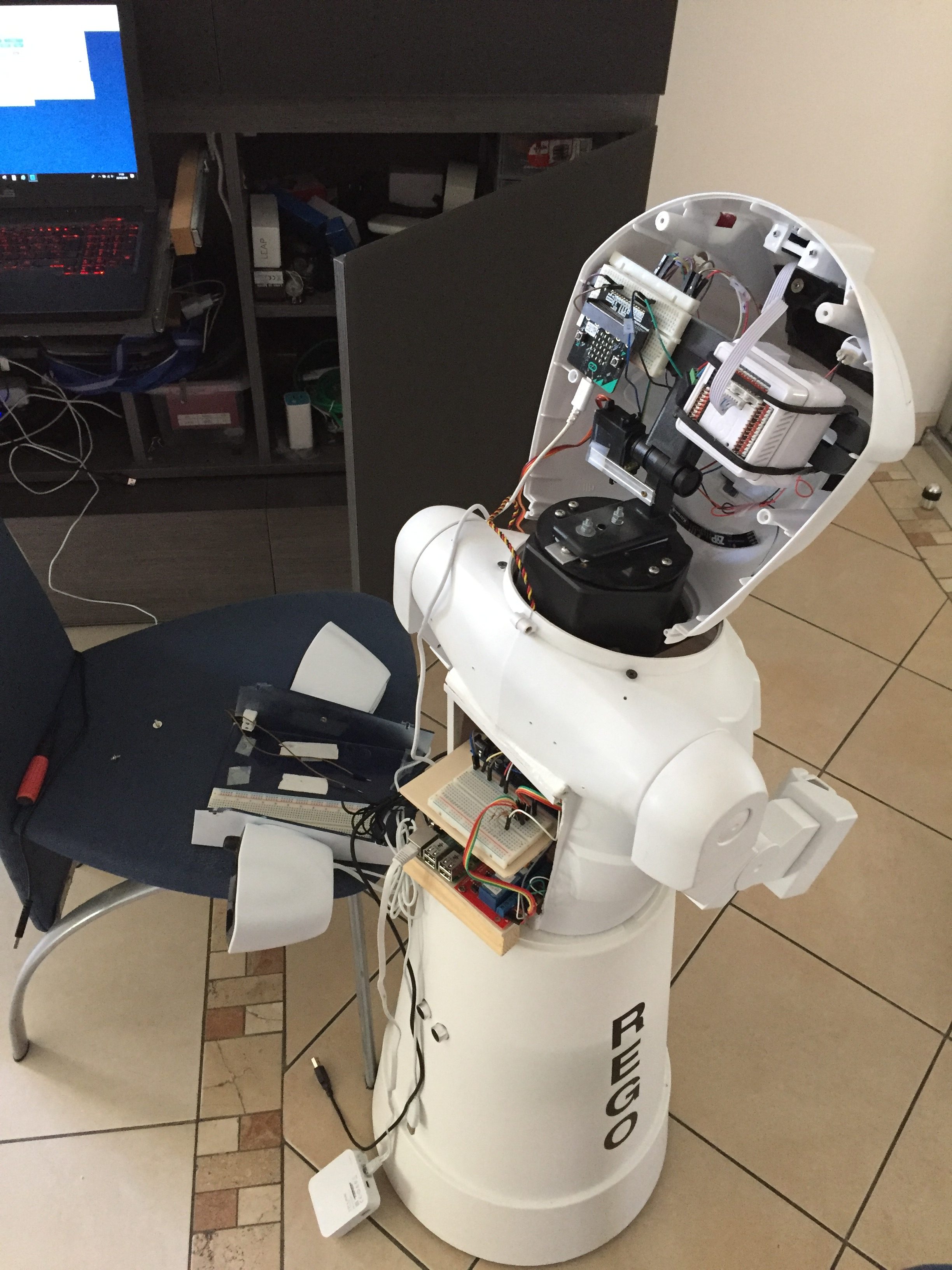
La base mobile : qu’est-ce qu’il y a sous le capot ?
Le robot sera piloté par le une interface Web sur un Raspberry pi 3 qui commande un Arduino Méga par l’intermédiaire de relais. L’Arduino Méga va piloter la base mobile par I2C.








Découvrez en détail les composants de REGO dans mon article REGO : Nouvelle version.
Retrouvez les version précédentes de REGO : Version 1 , Version 2