REGO Version 1 : J’ai créé cette première version en 2011, juste avant l’arrivée du Raspberry pi.
La base de ce robot est un Emilio (célèbre jouet des années 80), sur lequel j’ai greffé divers composants. REGO est un robot DIY « Do It Yourself » en Français « Fait maison ». Le but premier était d’utiliser des briques de technologies déjà existantes et de les réunir afin de concevoir, à moindre coût, un robot avatar. Ce robot va nous permettre de voir, d’entendre, nous déplacer et discuter avec les personnes autour du robot à partir d’un simple navigateur Web, donc à partir de n’importe où dans le monde.

CARACTERISTIQUES :
- Robot Emilio, deux moteurs intégrés
- Netbook tactile embarqué
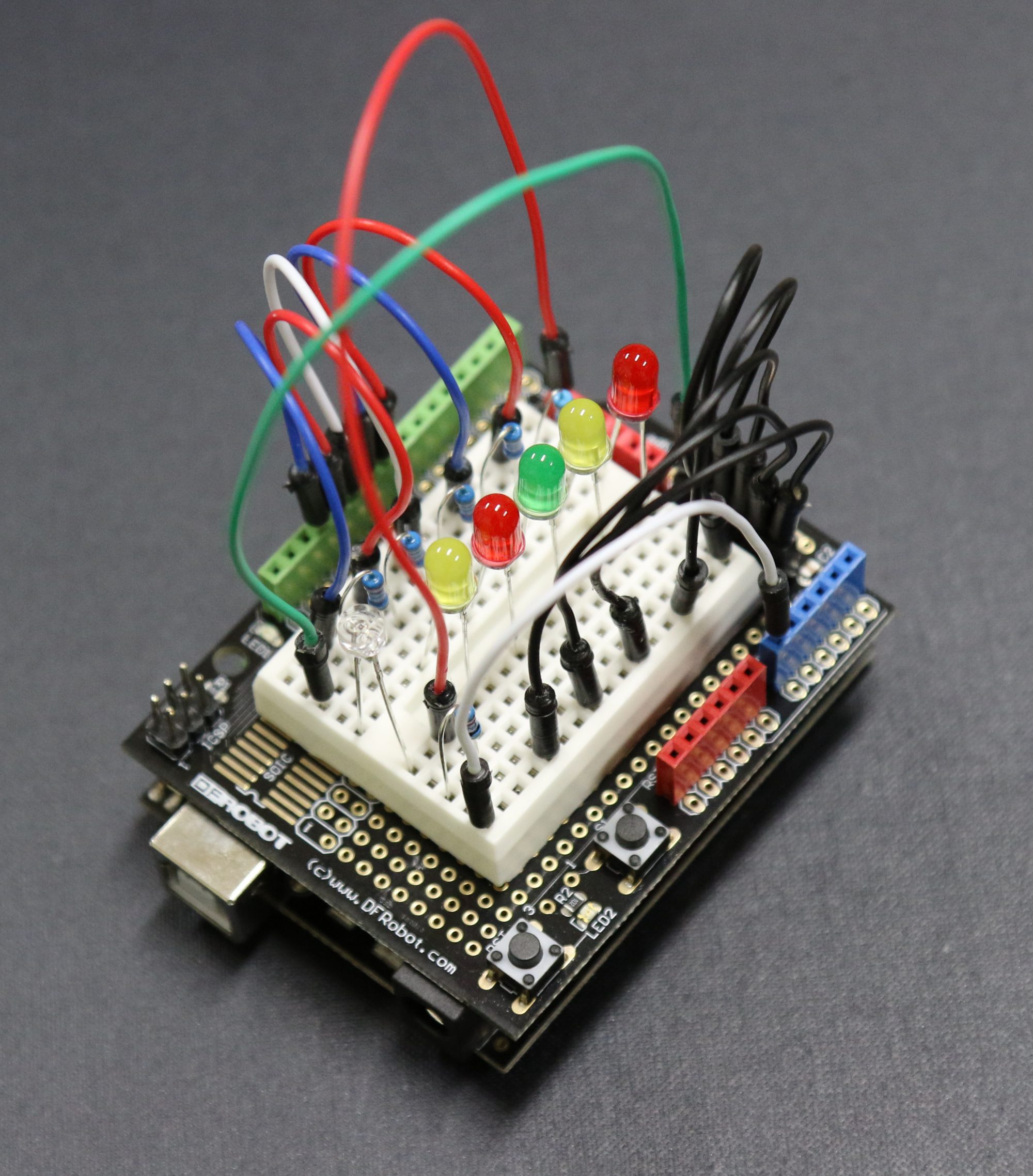
- Carte d’interface de commande Arduino UNO
- Carte d’interface PNP Board avec Pic basic
- Télémètre infrarouge : SHARP GP2D12
- Télémètre ultrason MSU05
- Capteur de contact
- Webcam avec micro intégré
Actionneurs :
- 2 moteurs d’origine
- Mini enceintes de PC Philips
- Ecran tactile netbook
- Commande de la locomotion du Robot (avance, droite, gauche, arrière)
- Retours capteurs (barre-graphe)
- Boutons de commandes (en attente)
- Dialogue entre PC et carte par RS232
- Accès au PC du Robot par LogMeIn
- Dialogue avec le Robot par Skype
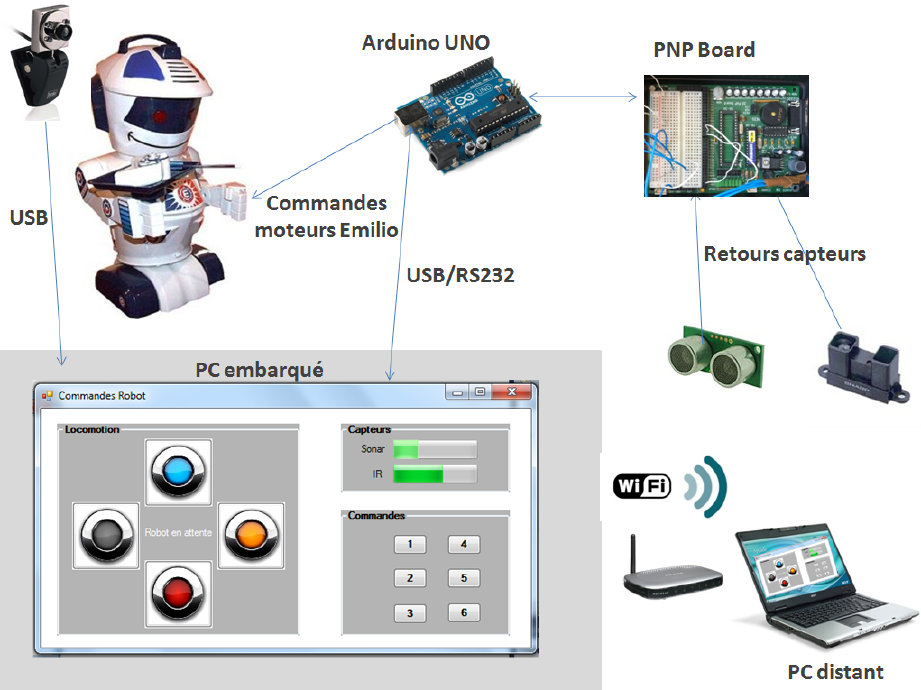
Architecture système
Emilio embarque un Netbook : finalement solution la moins onéreuse (à l’époque) et la plus simple pour profiter du Wifi, du Bluetooth, de la puissance de calcul, de la compatibilité des softs etc. De plus, celui-ci est tactile, il va donc rajouter de l’interactivité au Robot. Une carte Arduino UNO et PNP Board (ancêtre de l’Arduino) sont utilisées comme interface de commande entre le PC et le robot. Le Robot peut être piloté par un ordinateur distant, nous pouvons nous déplacer, voir, entendre et discuter avec les personnes autour du Robot. J’ai utilisé visual basic 2010 pour créer l’interface de commande.