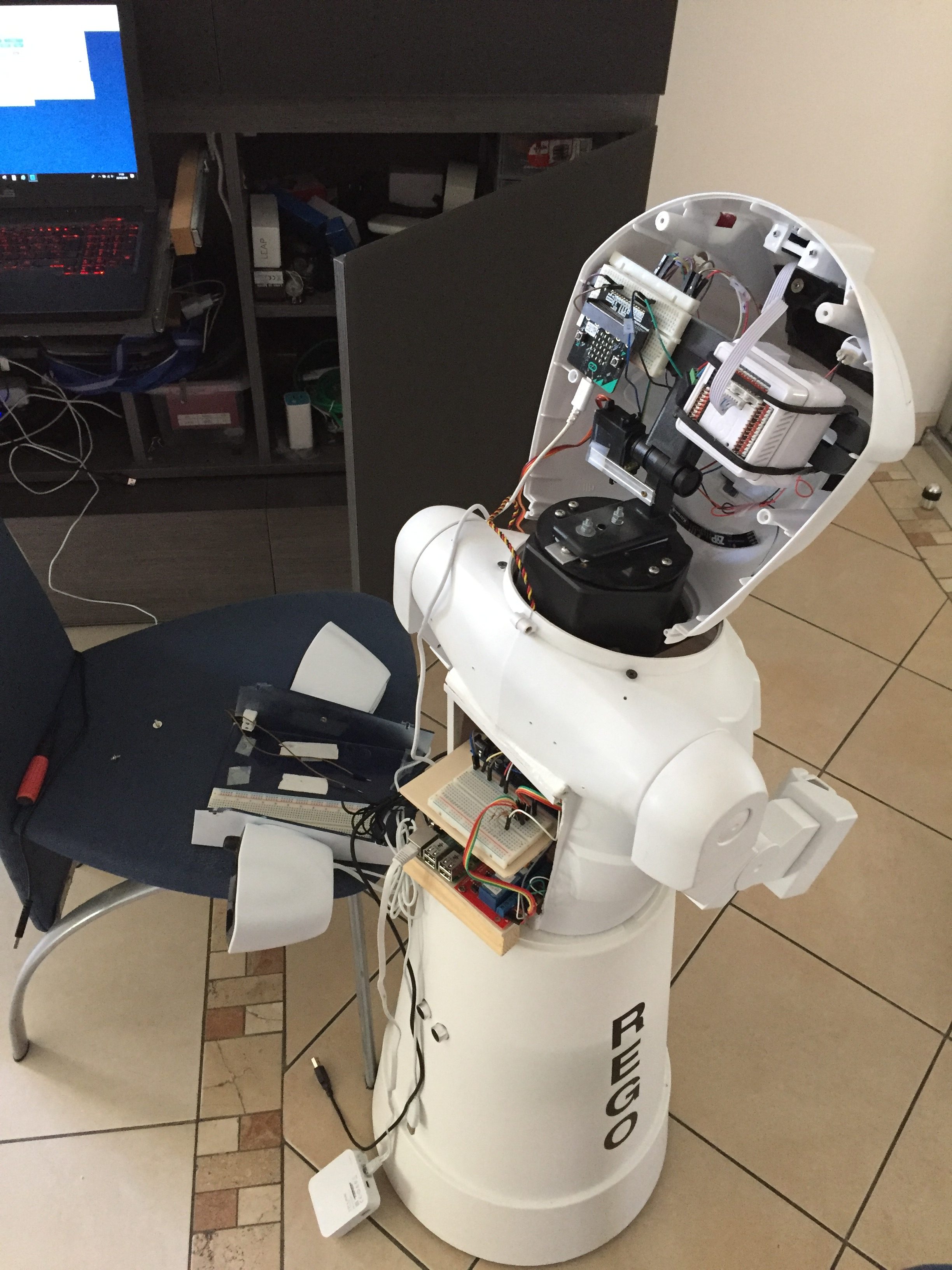
REGO : version 2019.
 Fonctions actuelles : Robot de télé-présence, on peut voir, entendre, parler et se déplacer à distance à partir d’un simple navigateur web.
Fonctions actuelles : Robot de télé-présence, on peut voir, entendre, parler et se déplacer à distance à partir d’un simple navigateur web.
La base de ce robot est un Emilio (célèbre jouet des années 80), sur lequel j’ai greffé divers composants. REGO est un robot DIY « Do It Yourself » en Français « Fait maison ».
Fonctions en cours d’implémentation : Plusieurs objectifs. Le premier, modifier son design général afin de lui donner de la hauteur. Actuellement, il mesure 1,10m de haut. L’objectif est d’atteindre une hauteur raisonnable afin qu’il puisse interagir de manière convenable avec une personne debout. Un autre objectif est de lui donner de l’autonomie en lui ajoutant des fonctions de reconnaissance de visage, reconnaissance vocale, possibilité de naviguer dans son environnement tout seul. Par la suite, grâce aux nombreuses possibilités avec le Raspberry pi, lui ajouter des fonctions de commandes domotiques.
Fonctions implémentées :
-Robot de télé-présence.
-Reconnaissance des visages et des couleurs.
CARACTÉRISTIQUES
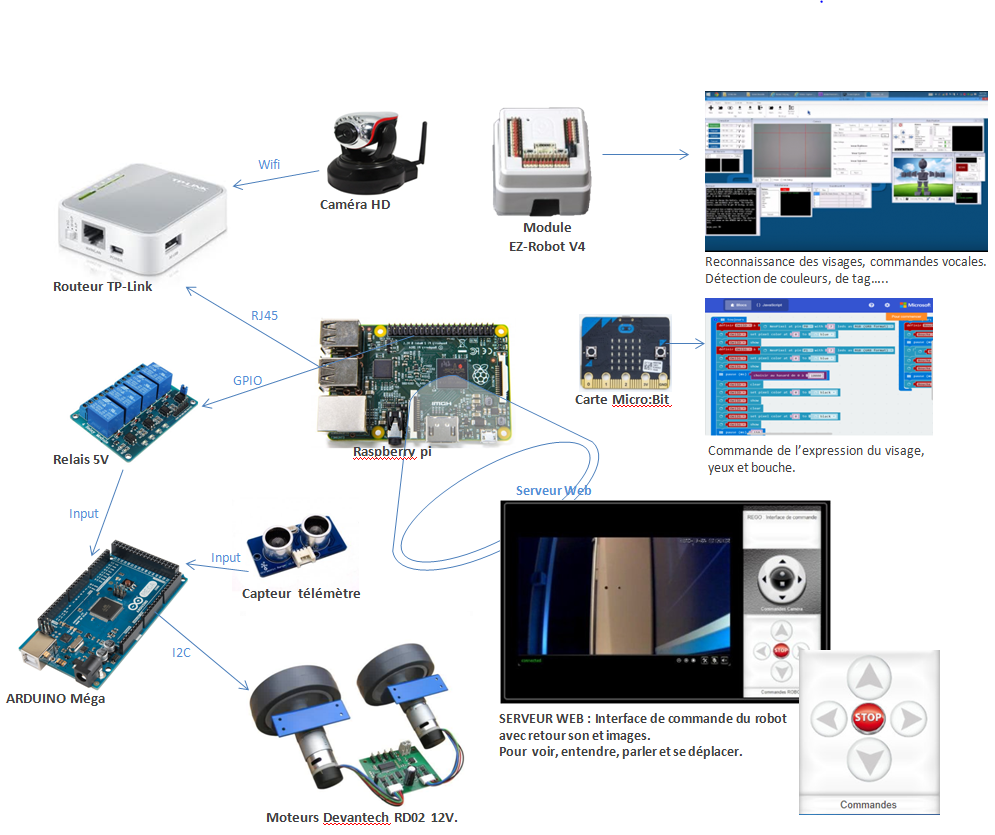
REGO est propulsé par une base mobile robotique. Un Raspberry pi 4 est utilisé pour le serveur web et un Raspberry pi 3 monté sur un écran tactile pour l’interaction avec les personnes. Un Arduino Mega pour la gestion des capteurs, le tout interfacé par une carte relais qui permet le dialogue entre l’Arduino et le Raspberry pi sans se soucier des problèmes de 3v-5V entre les 2 cartes. La caméra ip mobile est conservée pour la navigation en temps réel. Et 3 capteurs ultrason MSU05 assurent la détection des obstacles. Deux nouveaux modules seront implémentés : la carte Raspberry pi Sense Hat utilisé pour ses capteurs de température, pression atmosphérique, accéléromètre et le module EZ-Robot, utilisé pour ajouter les fonctions de reconnaissance des couleurs, suivi de visage, reconnaissance vocale, etc…

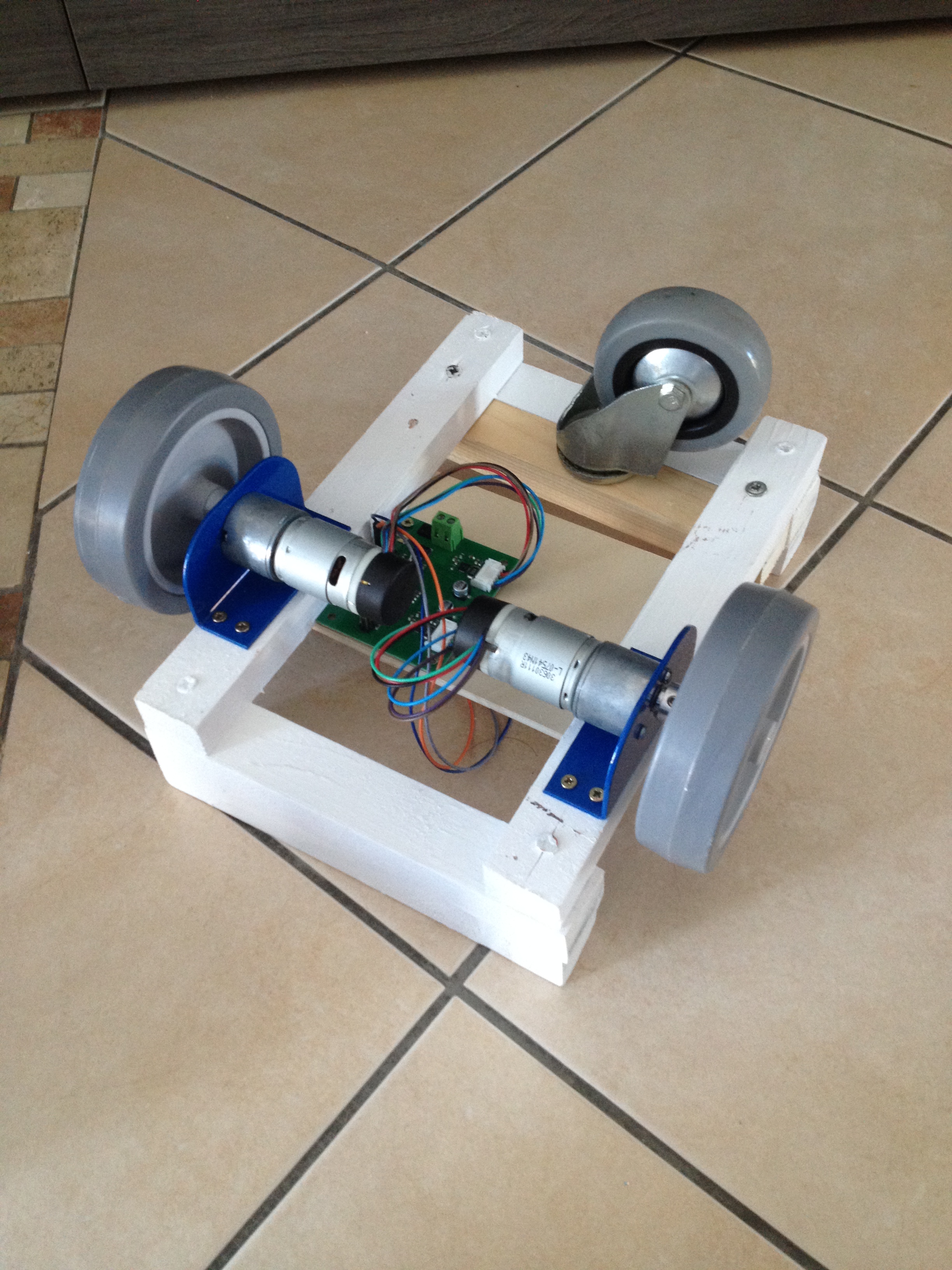


La base Mobile
La Devantech RD02 12V.
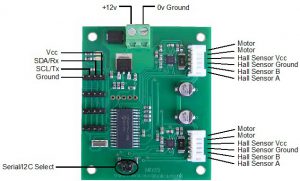
La carte est pilotée en I2C par l’arduino. Cette base mobile apporte de la fluidité et de la précision dans le déplacement du robot.
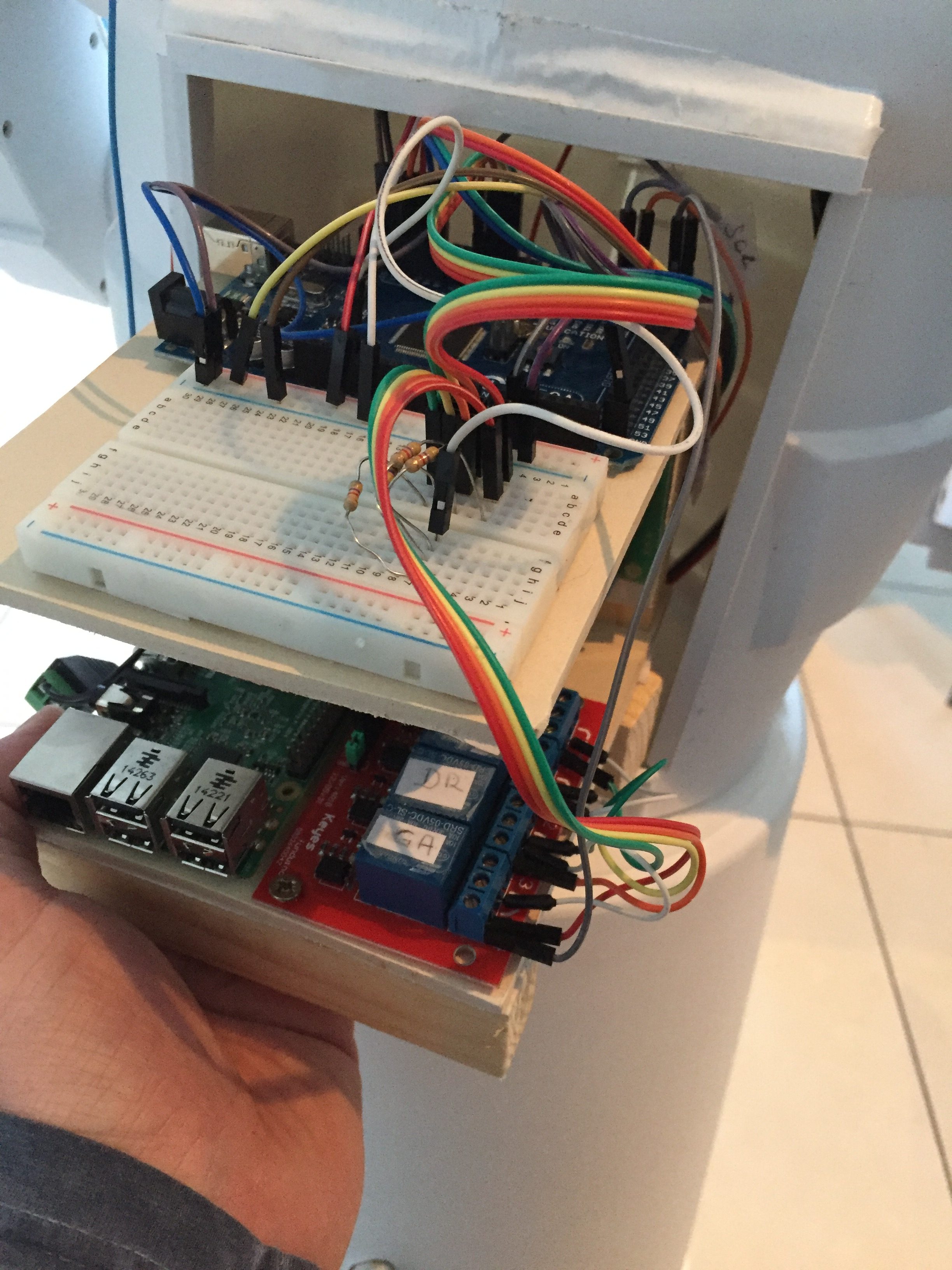
Le cerveau : (ou plutôt les cerveaux)
 Un raspberry pi 3 va fait office de serveur Web. Il commande la locomotion par l’intermédiaire de l’Arduino Mega et va diffuser, à partir de la caméra ip, ce que voit et entend le robot en temps réel.
Un raspberry pi 3 va fait office de serveur Web. Il commande la locomotion par l’intermédiaire de l’Arduino Mega et va diffuser, à partir de la caméra ip, ce que voit et entend le robot en temps réel.
Un deuxième Raspberry pi, intégré à l’écran tactile officiel Raspberry pi, est utilisé pour interagir avec les personnes autour du robot.

Un nouveau module pour de nouvelles fonctionnalités : le module EZRobot
 Une des nouveautés de cette nouvelle version de REGO est l’intégration d’un module robotique qui permet de rajouter des fonctions, de type : reconnaissance des couleurs, suivi des visage ou commande vocales, de manière très simple. Ce module est le module de Ez-Robot, le EZ-B v4. Je vous le présente dans cet article ici .
Une des nouveautés de cette nouvelle version de REGO est l’intégration d’un module robotique qui permet de rajouter des fonctions, de type : reconnaissance des couleurs, suivi des visage ou commande vocales, de manière très simple. Ce module est le module de Ez-Robot, le EZ-B v4. Je vous le présente dans cet article ici .
Gestions des yeux et de la bouche pour les expressions du visage de REGO avec la carte Micro:Bit

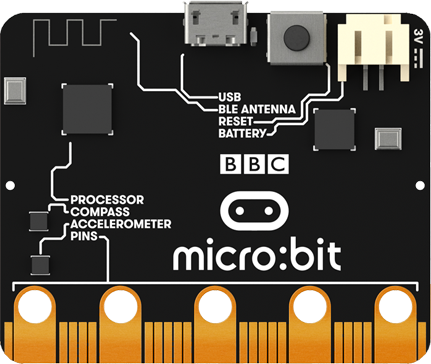
Microt:bit est comparable à une carte Arduino mais encore plus facile à programmer. Il suffit de la brancher sur le port USB de son ordinateur et d’ouvrir son navigateur internet à la page makecode.microbit.org afin d’accéder à l’interface de programmation. Elle permet de programmer la carte sans aucune ligne de code, de manière graphique, en faisant glisser des items à la façon de « Scratch » le logiciel désormais bien connu. Pour les plus avertis, l’interface permet d’accéder aux lignes de code en JavaScript. Cette carte, qui ne coûte que 19,90€ propose des spécificités techniques avancées : 25 LEDs programmables individuellement, 2 boutons programmables, Broches de connexion type E/S analogique et numérique, PMW, I2C, SPI, des capteurs de lumière et de température, capteurs de mouvements (accéléromètre et boussole), communication sans fil, via Radio et Bluetooth. J’utilise cette carte pour piloter des bandeaux LED RVB NeoPixel. Elle permet de décharger le reste des composants notamment l’Arduino qui est déjà bien occupé à gérer les capteurs et la commande moteur. 
Une des spécificité très pratique de l’interface de programmation et qu’elle propose le schéma de montage physique des proches et des composants au fur et à mesure que l’on construit le code. On peut donc tester instantanément le résultat sans devoir le transférer sur la carte. Une fois le code terminé, il suffit d’enregistrer le résultat sous forme d’un fichier texte et de le glisser/déposer dans la carte qui apparaît comme une clé USB dans le navigateur. Coder cette carte est un véritable plaisir et d’une simplicité déconcertante. Pour plus d’infos sur cette carte c’est ici.
Les autres capteurs de REGO
- Télémètre ultrason MSU05
- Capteur de contact
- Caméra HD 1082p motorisée avec serveur Web intégré
- Télémètre infrarouge : SHARP GP2D12
Interface de commande Web
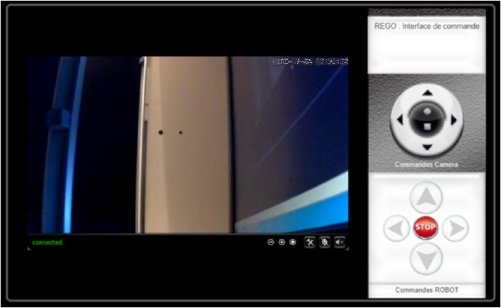
Pour l’instant on conserve l’interface Web de commande en l’état, réalisé depuis la version 2 de REGO. Elle permet de piloter le robot, voir, entendre et parler avec les personnes autour du robot. Elle est présente physiquement sur le serveur Web du Raspberry pi 3.
Réseau

Pour orchestrer le tout, un routeur portable TP-Link MR3020 (Wifi et 3G) embarqué sur le robot. Le Raspberry pi est relié en RJ45 et la caméra en Wifi. Avec ce routeur, le robot est vu comme une box, il est donc facile de s’y connecter en wifi avec n’importe quel appareil.
Alimentation
 Les raspberry pi et le routeur ont chacun son Accumulateur Lithium Polymer rechargeable 5v 1A 5000mAh.
Les raspberry pi et le routeur ont chacun son Accumulateur Lithium Polymer rechargeable 5v 1A 5000mAh.
 La base mobile et les moteurs sont alimentés par une batterie 12V.
La base mobile et les moteurs sont alimentés par une batterie 12V.
Architecture système
Une autre nouveauté de cette version de REGO qui sera implémentée plustard, c’est l’intégration de la carte Raspberry pi Sense Hat
Principales caractéristiques :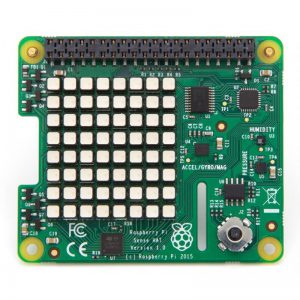
- Matrice d’affichage LED 8 × 8
- Accéléromètre, Gyroscope et Magnétomètre
- Capteur de pression d’air
- Capteur de température et d’humidité
- Joystick Teeny

Avec cette célèbre carte, utilisée dans la station spatiale ISS, taillée pour le Raspberry pi, on va pouvoir obtenir des capteurs : L’orientation (lacet, tangage et roulis) via un accéléromètre, un gyroscope 3D et un magnétomètre. La pression atmosphérique, le taux d’humidité, la température. Grace à la matrice Led 8×8, on va pouvoir illuminer le robot et même afficher des messages déroulants.
REGO invité au salon de la robotique et des drones 2018 : Retrouvez les images.
